We are done! Despite encountering myriad technical challenges throughout the Tate Exchange, in the end it was a great a success and the project worked perfectly on the final day. With a change of communication from web sockets to radio transceivers, we were able to seamlessly integrate both halves of project. Click read more to see it in action!
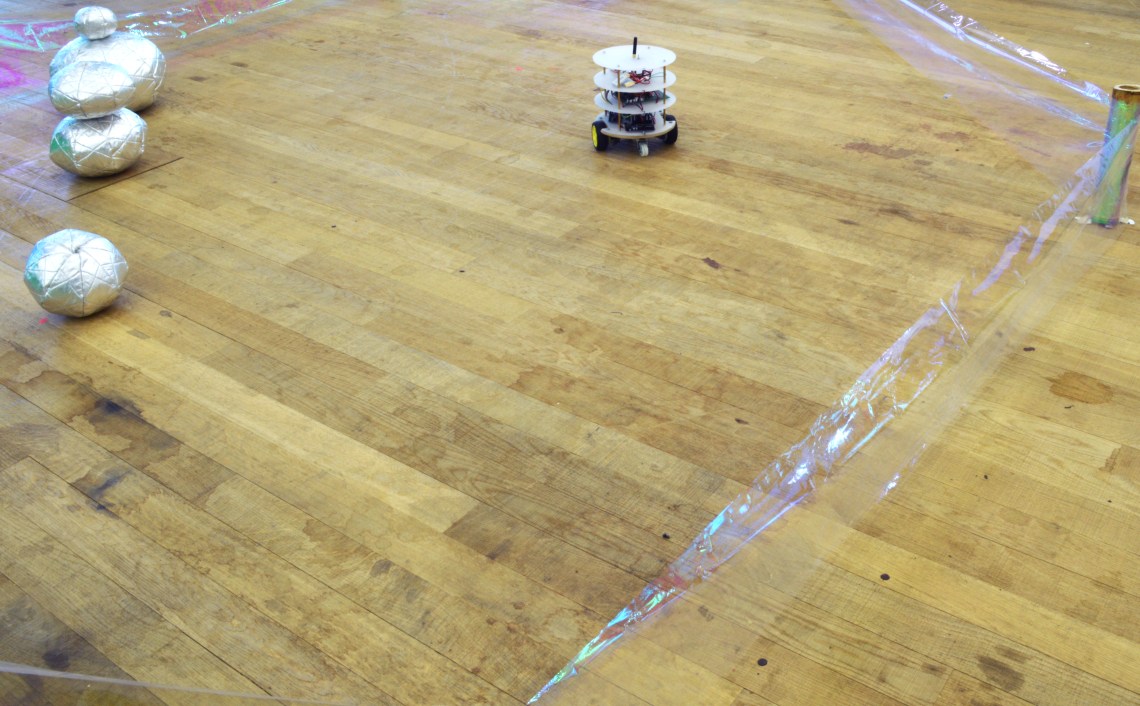
Here you can see the object avoiding robot roaming around in its pen. Its movement is mirrored in the 3D virtual world on the screen in the background. Every time the robot encounters an object, a tree is planted in the corresponding position in the world.
Here’s a closeup of the screen:
The virtual world was programmed using the Ogre3D library. There is a simple landscape and sky box within which a camera moves based on positional information it receives from the robot. The protocol is deceptively simple as we did not need accuracy. The camera moves forward at a constant rate until it receives a “turn message”. It then stops, rotates by the amount it is told to, and starts moving again when told to. Every time it receives a turn command a tree is spawned at its position. The simplicity of this command system meant we did not need to deal with positioning systems, although we may experiment with accelerometers and GPS trackers in the future to create something accurate.
The result is a surreal, virtual landscape where the objects of the real world are all reduced to the same psychedelic tree. They also serve as a lingering trace of the robot’s movements.
For the first two sessions we we using our Aether platform to communicate over the internet. However, there were so many people using the internet at the Tate that there was too much interference and we could not get a good signal (even when using a wireless LAN). For the last two sessions we switched to using radio transceivers. We opted for these ones, which are easy to use when connected to an Arduino. It was then just a case of implementing Serial communication code within the virtual world program.
Now we are ready to move on to the next stage of the Aether project, so watch this space for more information soon!